GEOOSC
Geostationary Orbit Debris Slots Clearance
Geostationary Orbit Debris Slots Clearance
Explore the MissionOur Team
Meet the talented engineers and scientists behind the GEOOSC mission, working together to clear debris from geostationary orbit.

Ziyad AlShamrani
Computer Engineering, Team Leader
- • Defined overall system architecture and data flows
- • Integrated subsystems (power, comms, control, payload)
- • Established I²C/SPI bus protocols and error-handling
- • Coordinated cross-discipline milestones and deliverables
- • Designed, implemented, and integrated the CubeSat embedded systems

Nawaf AlDowayan
Computer Science
- • Developed LiDAR preprocessing, 2D clustering for obstacle avoidance
- • Integrated YOLOv8-based object detector for debris identification
- • Implemented real-time path-planning on Raspberry Pi
- • Built web dashboard for ground-station telemetry and commands

Asim AlZahrani
Electrical Engineering
- • Designed power budget: solar array sizing, MPPT charger, battery pack
- • Engineered voltage regulation and power-distribution PCB
- • Defined S-band ground-station link budget and comms protocol
- • Validated in-orbit telemetry uplink/downlink reliability

Elyas AlHabub
Computer Engineering
- • Wrote embedded firmware for ESP32-S3 and Pi Zero sensor hubs
- • Implemented PID-based attitude control via reaction wheels
- • Developed robotic-arm drive code and valve actuation routines
- • Managed command/data packet formatting and CRC checks

Mohammed Muqahhis
Aerospace Engineering
- • Sized and optimized monopropellant thruster via rocket-equation analysis
- • Performed FEM thermal/structural simulations on engine mounts
- • Generated propulsion tank and feed-line CAD and drawings
- • Verified ∆V requirements for GEO-graveyard transfer

Mohammed AlBssiri
Aerospace Engineering
- • Created 12U structural frame CAD with titanium Al-7075 geometry
- • Selected materials, defined fillets and tolerances for launch loads
- • Produced manufacturing drawings (A3 walls, thruster mounts)
- • Conducted vibration and modal analysis per CubeSat standards
Project Overview
Our mission is to develop a sustainable solution for removing debris from geostationary orbit, ensuring the safety and longevity of vital space infrastructure.
Background & Motivation
Geostationary orbit is now clogged with defunct satellites and fragments, threatening vital communications and broadcast platforms. GEOOSC deploys a CubeSat constellation to safely capture and escort 990 kg of end-of-life debris into a dedicated graveyard orbit.
Objectives & Deliverables
- • Thrust-optimized propulsion for 250 kg per CubeSat
- • S-band comms with 15 min real-time telemetry uplinks
- • AI-powered object detection (≥ 90% accuracy)
- • Robotic arm for secure attachment
- • Autonomous navigation & obstacle avoidance
- • Flight-ready prototype demonstration
Design & Development
We used Quality Function Deployment (QFD) to align customer needs—size, cost, reliability—with technical specifications. The final design integrates propulsion, robotics, LiDAR, and on-board AI into a single compact CubeSat.
Final Design & Results
Our design achieves a 3 km/s rendezvous, matches the target velocity, and delivers > 100 N thrust per CubeSat. All performance metrics meet or exceed specification.
Prototype Verification
Lab tests show 95.4% detection accuracy (mAP@0.5) and 355 ms inference time; telemetry latency under 0.1 s—comfortably in the real-time regime.
Conclusions & Next Steps
GEOOSC paves a cost-effective path to GEO debris mitigation. Next: hardware miniaturization, extended mission duration, and constellation scaling.
Gallery
Explore the technical designs, prototypes, and analysis that power our mission to clear geostationary orbit.
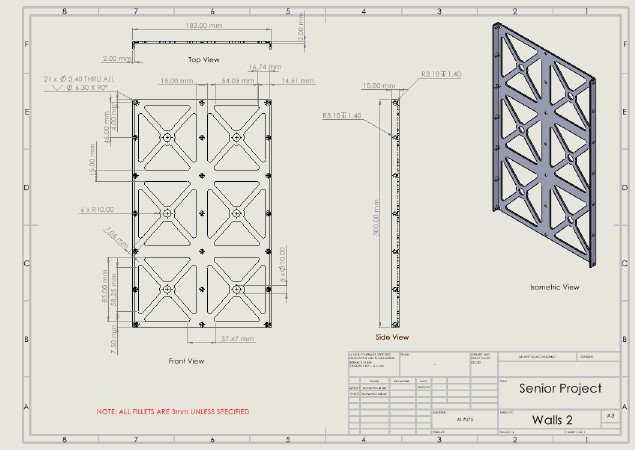
Side-panel dimensions
Side-panel dimensions
3 mm fillets
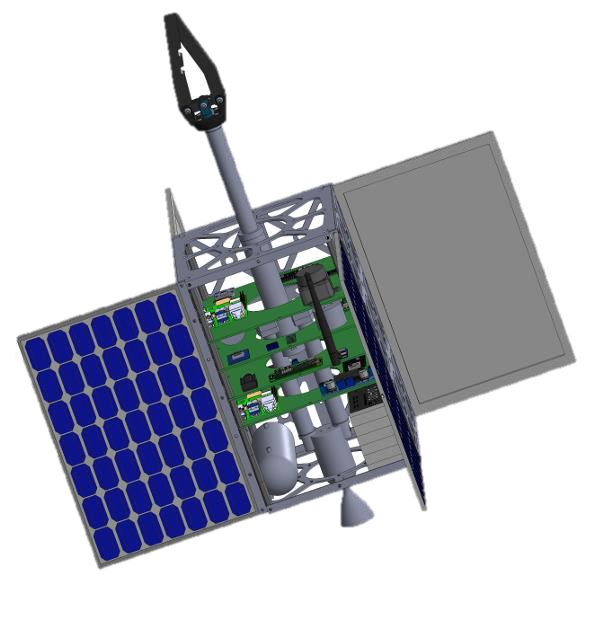
CubeSat Prototype
CubeSat Prototype
3D CAD render of the GEOOSC CubeSat prototype
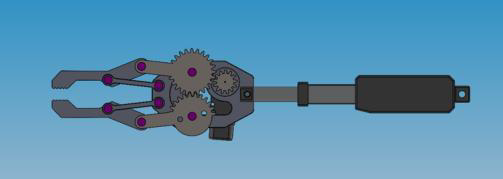
Robotic Arm
Robotic Arm
Robotic arm mechanism: actuator + gripper
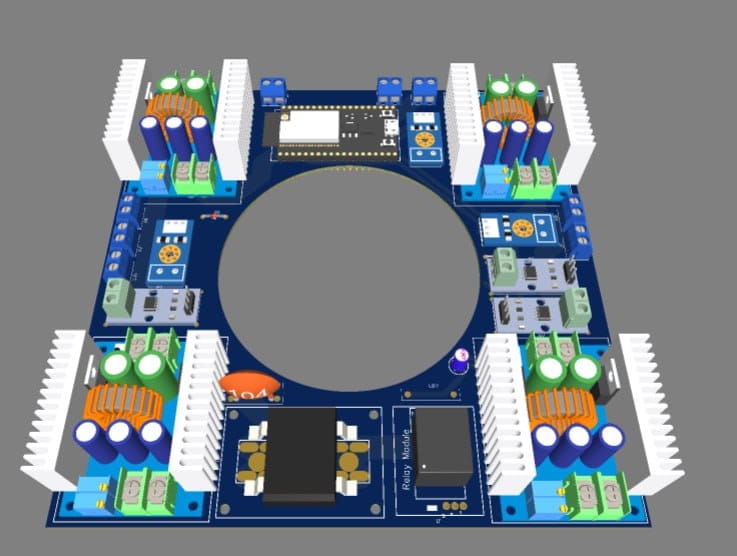
Power Management PCB
Power Management PCB
Quad-channel power distribution with thermal management
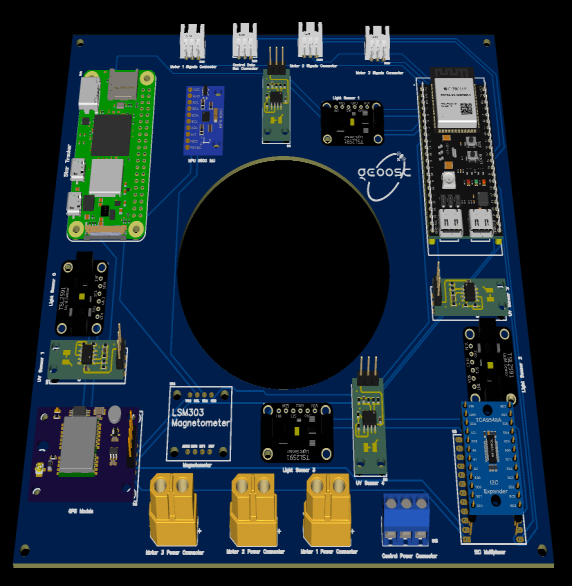
Sensor Distribution PCB
Sensor Distribution PCB
Power & sensor distribution PCB (top view)
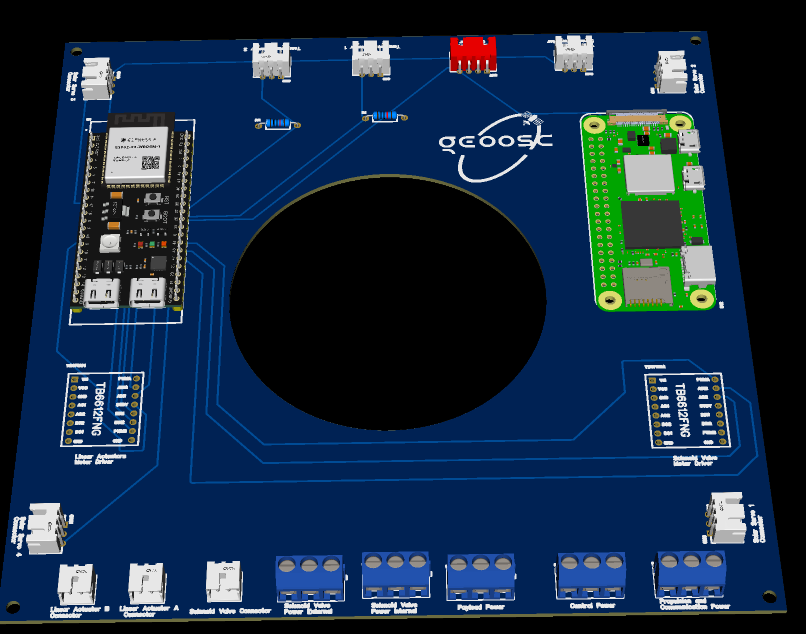
Communications PCB
Communications PCB
Communications & compute PCB (top view)
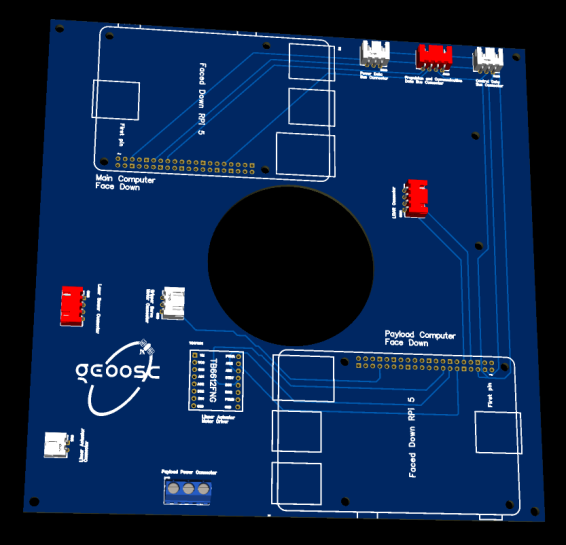
PCB Bottom Layer
PCB Bottom Layer
PCB bottom layer: connector footprints

Precision-Recall Curve
Precision-Recall Curve
Precision-Recall curve for on-board YOLO detection
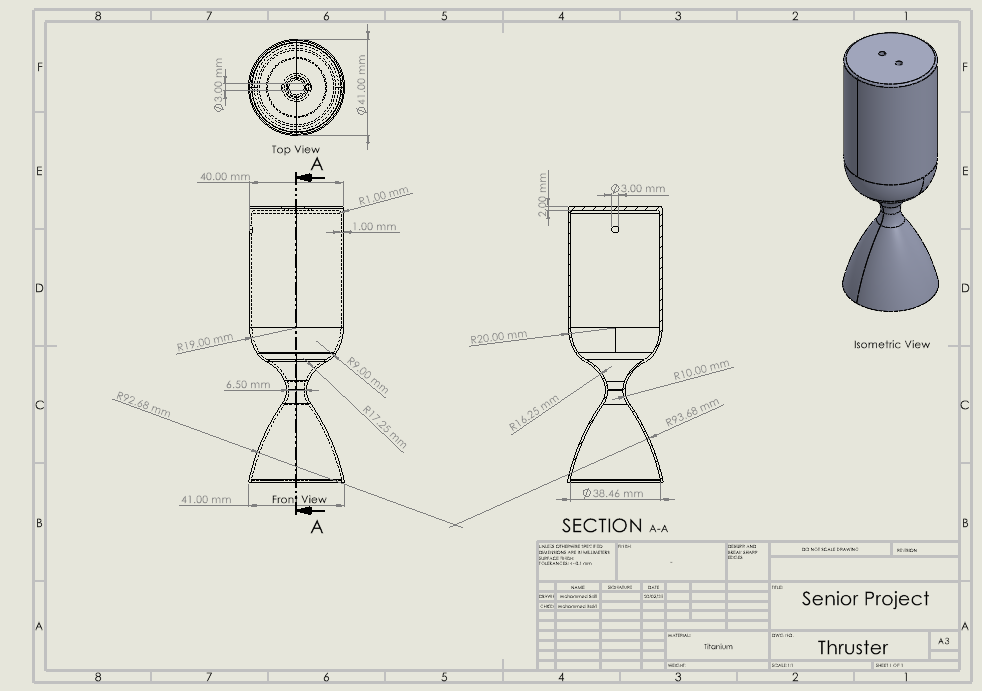
Thruster Design
Thruster Design
Thruster CAD Drawing with detailed dimensions
Contact Us
Have questions about our mission or interested in collaboration? Reach out to the GEOOSC team.
Send Us a Message
Explore Our Mission Data
Access real-time telemetry and mission analytics through our interactive dashboard